James Dyson Award 2025、日本国内最優秀賞は早稲田大学の学生が受賞
浮き上がるパネルによる全方向移動で、災害や起伏地の探索に対応する革新的な球体ロボットのアイデア

ジェームズ ダイソン財団は、国際学生デザイン・エンジニアリングアワードであるJames Dyson Award(ジェームズ ダイソン アワード、以下JDA)の2025年度国内最優秀賞1作品と国内準優秀賞2作品を発表しました。
【JDA2025 国内最優秀賞】
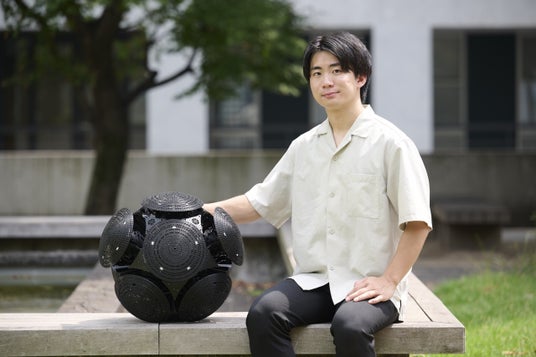
●「SPHEBOT」 <制作者: 早稲田大学 天野 創太氏>
災害や起伏地の探索に対応する、全方位移動可能な球体ロボット
【JDA2025 国内準優秀賞】
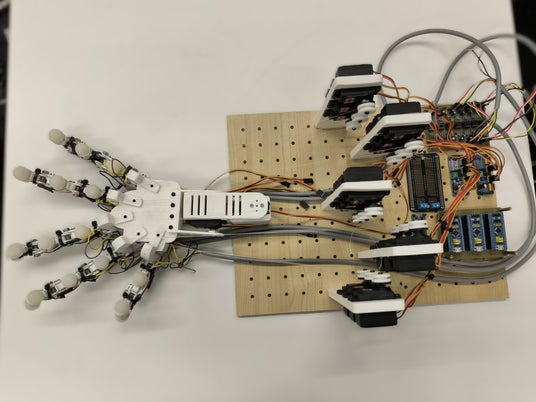
●「ERF Magnetic Tactile Sensors for Soft Robotic Hands」 <制作者: 早稲田大学 Prasetya Hutomo Winnyarto SULAKSONO氏>
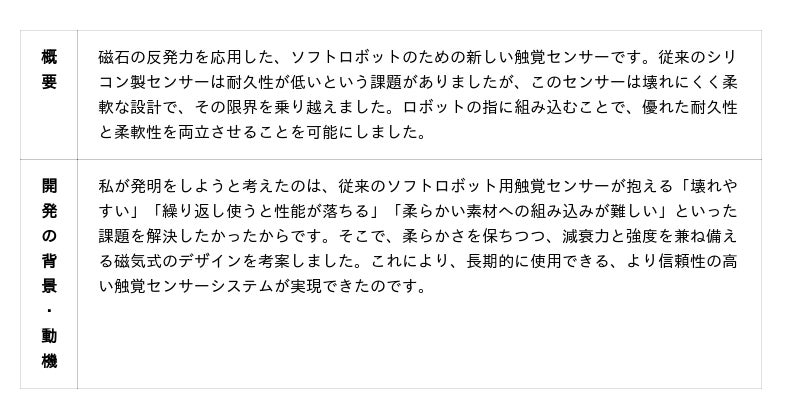
柔らかさを保ちながら触覚と制振機能を両立させた、ソフトロボットハンド用ERF磁気触覚センサー
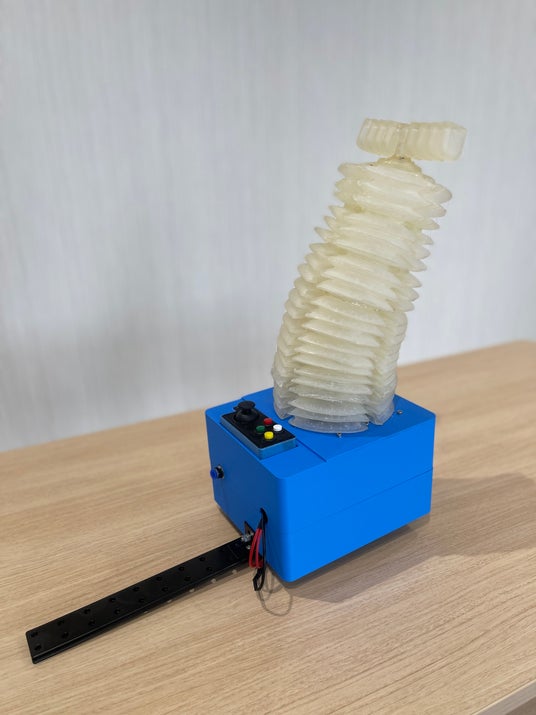
●「FAYRA」 <製作者: 京都先端科学大学 Rene Manuel Suarez Flores氏>
車椅子利用者の自立と安全な行動を支援する折りたたみ式ソフトロボットアーム
2005年の初開催以来、一貫して「問題解決のアイデア」をテーマとしてきた本アワードに、今年は世界28か国から2,100件を超える応募が寄せられました。国内審査の結果、JDA2025の国内最優秀賞には、早稲田大学の天野創太氏による、災害や起伏地の探索に対応する全方位移動可能な球体ロボット「SPHEBOT」のアイデアが選ばれました。
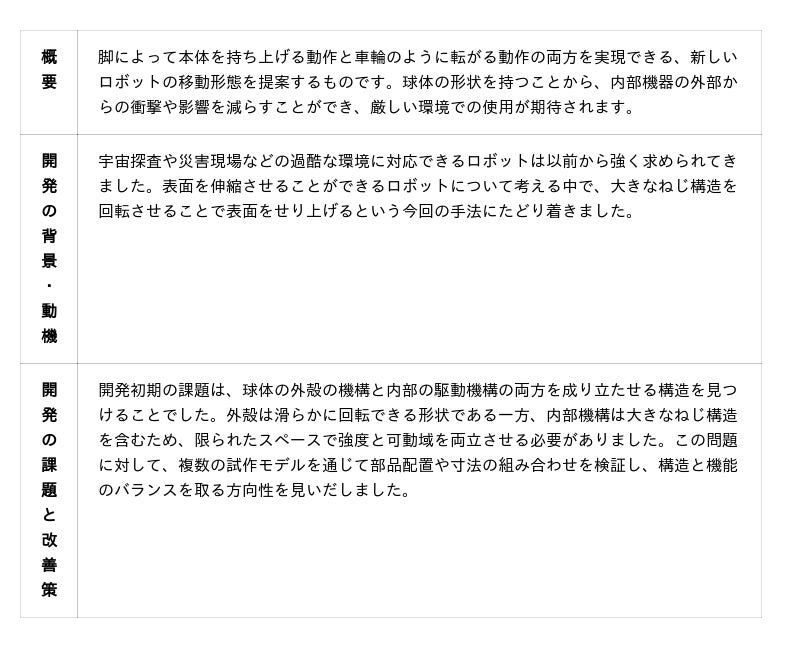
「SPHEBOT」は、脚を使って移動するロボットと、車輪を使って移動するロボットの両方の性能を兼ね備えた、新しい移動形態を提案しています。球体構造により、外部からの衝撃や危険から内部機器を保護できる設計となっており、災害現場や起伏の激しい土地など、過酷な環境での活躍が期待されています。
災害現場や探査などの環境に対応できるロボットが求められる中、「SPHEBOT」は徹底した軽量化と内部機器の安全性確保、そして全方向に安定して動き出せる仕組みの実現を目指し、約1年半にわたり開発が進められてきました。
今回の受賞にあたり、天野氏は「これまでの試行錯誤と改良の積み重ねが評価され、大変光栄に思います。自分の研究やものづくりの姿勢が社会的に認められたことは大きな励みとなり、さらなる挑戦への意欲を高めてくれました。」とコメントしています。また、今後の展望については、「さらに開発と検証を重ね、最終的には、様々な環境条件で動作可能な基礎技術として確立し、将来の応用開発に繋げることを目指します。」と述べています。なお、本受賞作品には賞金5,000ポンド(約80万円*)が贈られます。
<JDA2025 国内最優秀賞 : 「SPHEBOT」>
制作者 : 早稲田大学 天野 創太氏
https://www.jamesdysonaward.org/ja-JP/2025/project/sphebot-a-new-form-of-robotic-locomotion


JDA国内審査員 武井 祥平氏コメント
「球体状のボディ表面を物理的に押し出すことで自由な方向に転がるという、ありそうでなかったロボットの仕組み。試作と評価を繰り返してアップデートされているそのプロトタイプからは、ものづくりを心から楽しんでいる感覚が伝わってくる。思い描いたイメージを具現化するエンジニアリングの力も素晴らしいが、何より見る人をワクワクさせてくれる魅力が感じられる。」
<JDA2025 国内準優秀賞 : 「ERF Magnetic Tactile Sensors for Soft Robotic Hands」>
制作者 : 早稲田大学 Prasetya Hutomo Winnyarto SULAKSONO氏
https://www.jamesdysonaward.org/ja-JP/2025/project/erf-magnetic-tactile-sensors-for-soft-robotic-hand

JDA国内審査員 川上 典李子氏コメント:
「ソフトロボットハンドの柔軟性とマテリアルの耐久性の研究がなされ、磁気による反発を生かした触覚感知による柔軟性と、摩耗軽減によって可能とされる耐久性に富んだロボットハンドの提案がなされている。実験結果のデータも説得力に富むもので、真摯な研究過程と解決方法へのアプローチに関しても審査時の評価が集まった。ソフトロボットハンドの新たな可能性を示すプロジェクトであるだけに、開発の今後に注目していきたい。」
<JDA2025 国内準優秀賞 : 「FAYRA」>
制作者 :京都先端科学大学 Rene Manuel Suarez Flores氏
https://www.jamesdysonaward.org/ja-JP/2025/project/fayra-a-softer-reach


JDA 国内審査員 緒方 壽人氏コメント:
「腕の動作に困難のある車椅子利用者のための、折り畳め、低圧で動き、可動範囲も広く、実用性が高いソフトロボットアームです。実際の施設でのユーザーテストで、当事者のニーズやフィードバックを得ながら開発されている点も素晴らしいです。」
<今後の審査の流れ>
上記3作品を含む各国作品群は国際最終審査に進みます。世界28か国より国内優秀賞受賞作品が集まり、その中からダイソン創業者 ジェームズ ダイソンの選考により、国際TOP20作品が決定します。
選考結果は、国際TOP20作品を10月15日に、国際最優秀賞の結果を11月5日に発表予定です。国際最優秀賞受賞者とサステナビリティ賞受賞者には、賞金30,000ポンド(約470万円*)が贈られます。
*賞金参考金額: 1ポンド=およそ159円
<JDA2025 国内審査員>

緒方 壽人氏 (デザインエンジニア / Takram ディレクター)
東大工学部からIAMAS、LEADING EDGE DESIGNを経てTakramに参加。月面探査車の意匠コンセプトから、メーカーの製品開発、ショップや展覧会のディレクションまで、デザイン、エンジニアリング、アート、サイエンスを行き来し領域横断的な活動を行う。近著に『コンヴィヴィアル・テクノロジー』。

川上 典李子氏 (デザインジャーナリスト)
デザイン誌「AXIS」編集部を経て1994年に独立。企業やデザイナーの取材、執筆を行うほか、2007年より21_21 DESIGN SIGHT アソシエイトディレクターとしても活動。ほかにも「London Design Biennale 2016」日本公式展示キュレトリアル・アドバイザーを始め、国内外でのデザイン展の企画にも関わっている。グッドデザイン賞審査委員。武蔵野美術大学工芸工業デザイン学科客員教授。

武井 祥平氏 (エンジニア / nomena創業者)
2012年に東京大学大学院情報学環・学際情報学府修士課程を修了し、同年nomenaを設立。工学的な視座から前例のない表現の可能性を追求する活動を展開。東京2020聖火台主任機構設計者をはじめ、セイコーやJAXAとの共同制作・研究など、アーティストとの共同制作やテクニカルディレクションも手掛ける。主な受賞歴に、2024年毎日デザイン賞(2025)、文化庁メディア芸術祭アート部門優秀賞(2022)、東京大学総長賞(2012)など。
<ジェームズ ダイソン財団とジェームズ ダイソン アワードについて>
◆ジェームズ ダイソン財団 (James Dyson Foundation)
2002年に英国で設立されたジェームズ ダイソン財団は、現在では英国以外に、米国や日本、シンガポール、フィリピン、マレーシアといった世界中の国々で、デザイン、テクノロジー、エンジニアリング教育事業をサポートしています。ジェームズ ダイソンとジェームズ ダイソン財団はこれまでに慈善目的で1億4,000万ポンドを超える寄付を行ってきました。これには、インペリアル・カレッジ・ロンドンにダイソン スクール オブ デザイン エンジニアリングを設立するため行った1,200万ポンドの寄付や、ケンブリッジ大学にダイソン センター フォー エンジニアリング デザインおよびジェームズ ダイソン ビルの設立に向けた800万ポンドの寄付が含まれます。
◆ジェームズ ダイソン アワード (James Dyson Award)
ジェームズ ダイソン アワード( https://www.jamesdysonaward.org/ja-JP/ )は、エンジニアが世界の課題を解決する力を持っていることを証明するために設立されました。ジェームズ ダイソン財団によって運営され、これまでに400以上の発明に賞金や国際的なメディア露出を提供しています。2002年に設立された同財団は、次世代のエンジニアをインスパイアすることを使命とする国際教育慈善団体です。また、医療研究にも投資しており、これまでに1億4,500万ポンド以上を慈善事業に寄付しています。
最新情報はJDAのInstagram( https://www.instagram.com/jamesdysonaward/?hl=en ※英語のみ )や、Dyson Newsroom( https://www.dyson.co.jp/discover/news )でも随時ご案内します。
企業プレスリリース詳細へ
PR TIMESトップへ
ジェームズ ダイソン財団は、国際学生デザイン・エンジニアリングアワードであるJames Dyson Award(ジェームズ ダイソン アワード、以下JDA)の2025年度国内最優秀賞1作品と国内準優秀賞2作品を発表しました。
【JDA2025 国内最優秀賞】
●「SPHEBOT」 <制作者: 早稲田大学 天野 創太氏>
災害や起伏地の探索に対応する、全方位移動可能な球体ロボット
【JDA2025 国内準優秀賞】
●「ERF Magnetic Tactile Sensors for Soft Robotic Hands」 <制作者: 早稲田大学 Prasetya Hutomo Winnyarto SULAKSONO氏>
柔らかさを保ちながら触覚と制振機能を両立させた、ソフトロボットハンド用ERF磁気触覚センサー
●「FAYRA」 <製作者: 京都先端科学大学 Rene Manuel Suarez Flores氏>
車椅子利用者の自立と安全な行動を支援する折りたたみ式ソフトロボットアーム
2005年の初開催以来、一貫して「問題解決のアイデア」をテーマとしてきた本アワードに、今年は世界28か国から2,100件を超える応募が寄せられました。国内審査の結果、JDA2025の国内最優秀賞には、早稲田大学の天野創太氏による、災害や起伏地の探索に対応する全方位移動可能な球体ロボット「SPHEBOT」のアイデアが選ばれました。
「SPHEBOT」は、脚を使って移動するロボットと、車輪を使って移動するロボットの両方の性能を兼ね備えた、新しい移動形態を提案しています。球体構造により、外部からの衝撃や危険から内部機器を保護できる設計となっており、災害現場や起伏の激しい土地など、過酷な環境での活躍が期待されています。
災害現場や探査などの環境に対応できるロボットが求められる中、「SPHEBOT」は徹底した軽量化と内部機器の安全性確保、そして全方向に安定して動き出せる仕組みの実現を目指し、約1年半にわたり開発が進められてきました。
今回の受賞にあたり、天野氏は「これまでの試行錯誤と改良の積み重ねが評価され、大変光栄に思います。自分の研究やものづくりの姿勢が社会的に認められたことは大きな励みとなり、さらなる挑戦への意欲を高めてくれました。」とコメントしています。また、今後の展望については、「さらに開発と検証を重ね、最終的には、様々な環境条件で動作可能な基礎技術として確立し、将来の応用開発に繋げることを目指します。」と述べています。なお、本受賞作品には賞金5,000ポンド(約80万円*)が贈られます。
<JDA2025 国内最優秀賞 : 「SPHEBOT」>
制作者 : 早稲田大学 天野 創太氏
https://www.jamesdysonaward.org/ja-JP/2025/project/sphebot-a-new-form-of-robotic-locomotion
JDA国内審査員 武井 祥平氏コメント
「球体状のボディ表面を物理的に押し出すことで自由な方向に転がるという、ありそうでなかったロボットの仕組み。試作と評価を繰り返してアップデートされているそのプロトタイプからは、ものづくりを心から楽しんでいる感覚が伝わってくる。思い描いたイメージを具現化するエンジニアリングの力も素晴らしいが、何より見る人をワクワクさせてくれる魅力が感じられる。」
<JDA2025 国内準優秀賞 : 「ERF Magnetic Tactile Sensors for Soft Robotic Hands」>
制作者 : 早稲田大学 Prasetya Hutomo Winnyarto SULAKSONO氏
https://www.jamesdysonaward.org/ja-JP/2025/project/erf-magnetic-tactile-sensors-for-soft-robotic-hand
JDA国内審査員 川上 典李子氏コメント:
「ソフトロボットハンドの柔軟性とマテリアルの耐久性の研究がなされ、磁気による反発を生かした触覚感知による柔軟性と、摩耗軽減によって可能とされる耐久性に富んだロボットハンドの提案がなされている。実験結果のデータも説得力に富むもので、真摯な研究過程と解決方法へのアプローチに関しても審査時の評価が集まった。ソフトロボットハンドの新たな可能性を示すプロジェクトであるだけに、開発の今後に注目していきたい。」
<JDA2025 国内準優秀賞 : 「FAYRA」>
制作者 :京都先端科学大学 Rene Manuel Suarez Flores氏
https://www.jamesdysonaward.org/ja-JP/2025/project/fayra-a-softer-reach
JDA 国内審査員 緒方 壽人氏コメント:
「腕の動作に困難のある車椅子利用者のための、折り畳め、低圧で動き、可動範囲も広く、実用性が高いソフトロボットアームです。実際の施設でのユーザーテストで、当事者のニーズやフィードバックを得ながら開発されている点も素晴らしいです。」
<今後の審査の流れ>
上記3作品を含む各国作品群は国際最終審査に進みます。世界28か国より国内優秀賞受賞作品が集まり、その中からダイソン創業者 ジェームズ ダイソンの選考により、国際TOP20作品が決定します。
選考結果は、国際TOP20作品を10月15日に、国際最優秀賞の結果を11月5日に発表予定です。国際最優秀賞受賞者とサステナビリティ賞受賞者には、賞金30,000ポンド(約470万円*)が贈られます。
*賞金参考金額: 1ポンド=およそ159円
<JDA2025 国内審査員>
緒方 壽人氏 (デザインエンジニア / Takram ディレクター)
東大工学部からIAMAS、LEADING EDGE DESIGNを経てTakramに参加。月面探査車の意匠コンセプトから、メーカーの製品開発、ショップや展覧会のディレクションまで、デザイン、エンジニアリング、アート、サイエンスを行き来し領域横断的な活動を行う。近著に『コンヴィヴィアル・テクノロジー』。
川上 典李子氏 (デザインジャーナリスト)
デザイン誌「AXIS」編集部を経て1994年に独立。企業やデザイナーの取材、執筆を行うほか、2007年より21_21 DESIGN SIGHT アソシエイトディレクターとしても活動。ほかにも「London Design Biennale 2016」日本公式展示キュレトリアル・アドバイザーを始め、国内外でのデザイン展の企画にも関わっている。グッドデザイン賞審査委員。武蔵野美術大学工芸工業デザイン学科客員教授。
武井 祥平氏 (エンジニア / nomena創業者)
2012年に東京大学大学院情報学環・学際情報学府修士課程を修了し、同年nomenaを設立。工学的な視座から前例のない表現の可能性を追求する活動を展開。東京2020聖火台主任機構設計者をはじめ、セイコーやJAXAとの共同制作・研究など、アーティストとの共同制作やテクニカルディレクションも手掛ける。主な受賞歴に、2024年毎日デザイン賞(2025)、文化庁メディア芸術祭アート部門優秀賞(2022)、東京大学総長賞(2012)など。
<ジェームズ ダイソン財団とジェームズ ダイソン アワードについて>
◆ジェームズ ダイソン財団 (James Dyson Foundation)
2002年に英国で設立されたジェームズ ダイソン財団は、現在では英国以外に、米国や日本、シンガポール、フィリピン、マレーシアといった世界中の国々で、デザイン、テクノロジー、エンジニアリング教育事業をサポートしています。ジェームズ ダイソンとジェームズ ダイソン財団はこれまでに慈善目的で1億4,000万ポンドを超える寄付を行ってきました。これには、インペリアル・カレッジ・ロンドンにダイソン スクール オブ デザイン エンジニアリングを設立するため行った1,200万ポンドの寄付や、ケンブリッジ大学にダイソン センター フォー エンジニアリング デザインおよびジェームズ ダイソン ビルの設立に向けた800万ポンドの寄付が含まれます。
◆ジェームズ ダイソン アワード (James Dyson Award)
ジェームズ ダイソン アワード( https://www.jamesdysonaward.org/ja-JP/ )は、エンジニアが世界の課題を解決する力を持っていることを証明するために設立されました。ジェームズ ダイソン財団によって運営され、これまでに400以上の発明に賞金や国際的なメディア露出を提供しています。2002年に設立された同財団は、次世代のエンジニアをインスパイアすることを使命とする国際教育慈善団体です。また、医療研究にも投資しており、これまでに1億4,500万ポンド以上を慈善事業に寄付しています。
最新情報はJDAのInstagram( https://www.instagram.com/jamesdysonaward/?hl=en ※英語のみ )や、Dyson Newsroom( https://www.dyson.co.jp/discover/news )でも随時ご案内します。
企業プレスリリース詳細へ
PR TIMESトップへ